























")










 mantiene el nivel TQ Oro en la certificación de talleres de CESVIMAP")
 accede al nivel de certificación TQ de CESVIMAP")
 renueva el Oro en la certificación de talleres TQ de CESVIMAP")
, PLATA en la certificación de talleres TQ de CESVIMAP")
, alcanza la categoría Oro en la certificación de talleres TQ de CESVIMAP")






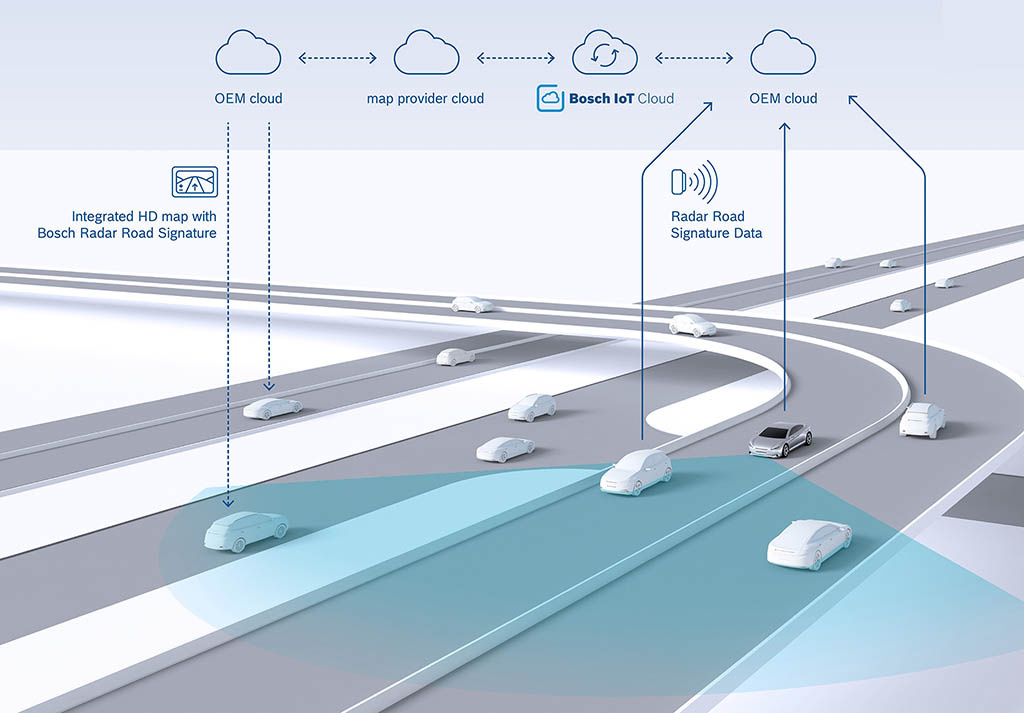
El “radar road signature” se compone de miles de millones de puntos de imagen individuales que van tomando forma a medida que las señales de radar rebotan; por ejemplo, en los guardarraíles o en las señales de tráfico, y reproducen fielmente el trazado de una carretera. Utiliza señales de radar, indispensable para elaborar mapas de alta precisión –hasta ahora, se usaban datos de señales de vídeo–. Con este mapa, los vehículos automatizados pueden determinar su ubicación exacta en un carril con una precisión de centímetros. Bosch y TomTom, el proveedor holandés de mapas digitales e información de tráfico, son sus creadores.
A diferencia de los mapas que dependen exclusivamente de los datos de vídeo para la localización de vehículos, el “radar road signature” funciona también de forma fiable por la noche y en condiciones de mala visibilidad. Además, sólo transmite a la nube cinco kilobytes de datos por kilómetro –volumen de datos casi dos veces inferior a los que usa un mapa formado por señales de vídeo. A más tardar en 2020, se prevé que los primeros vehículos proporcionarán datos para el “radar road signature” en Europa y Estados Unidos.
Bosch y TomTom han estado colaborando desde 2015. Sus sensores de radar tienen tecnología 77 gigahercios con un alcance de detección de 250 metros –los de vídeo sólo tienen un alcance de 150 metros–. El reto principal fue adaptar los sensores de radar existentes. Cuando se utilizan en un sistema de asistencia al conductor, como los sistemas de frenada automática de emergencia o el control de crucero adaptativo (ACC), los sensores detectan objetos en movimiento. Pero para el “radar road signature”, necesitan también detectar objetos estáticos, es decir, modificar los sensores de radar existentes.

Un millón de vehículos
Los mapas de alta resolución son esenciales para la conducción automatizada y proporcionan información más allá del área que los sensores pueden monitorizar. A diferencia de los de los dispositivos de navegación actuales, están formados por varias capas superpuestas:
- Capa de localización: un vehículo automatizado puede determinar su posición en un carril mediante el uso de una capa de localización que incluya el “radar road signature” y un mapa de localización de vídeo adicional. El dispositivo de navegación compara la información sobre objetos recibida a través de los sensores de entorno utilizando la información correspondiente de la capa de localización.
- Capa de planificación: se utiliza para calcular maniobras individuales durante la conducción automatizada (planificación de la trayectoria). También contiene información sobre el trazado de la carretera, señales de tráfico y límites de velocidad, así como curvas y peraltes. El vehículo automatizado la utilizará, por ejemplo, para decidir cuándo cambiar de carril.
- Capa dinámica: guarda información sobre situaciones cambiantes de tráfico: atascos de tráfico, obras en la calzada, estacionamientos disponibles…
Cada una de estas capas para la conducción automatizada necesita su actualización regular – la capa dinámica, incluso, en tiempo real–. Para ello, serán precisas flotas de alrededor de un millón de vehículos circulando. Los datos actuales para cada una de las capas serán generados por los sensores de a bordo de los vehículos mientras se desplazan.





